

Robot Bípedo Humanoide
Diseño humanoide a escala real
Diseñado para adaptarse a las proporciones del cuerpo adulto, con capacidades de percepción de alta precisión y avanzadas de movilidad
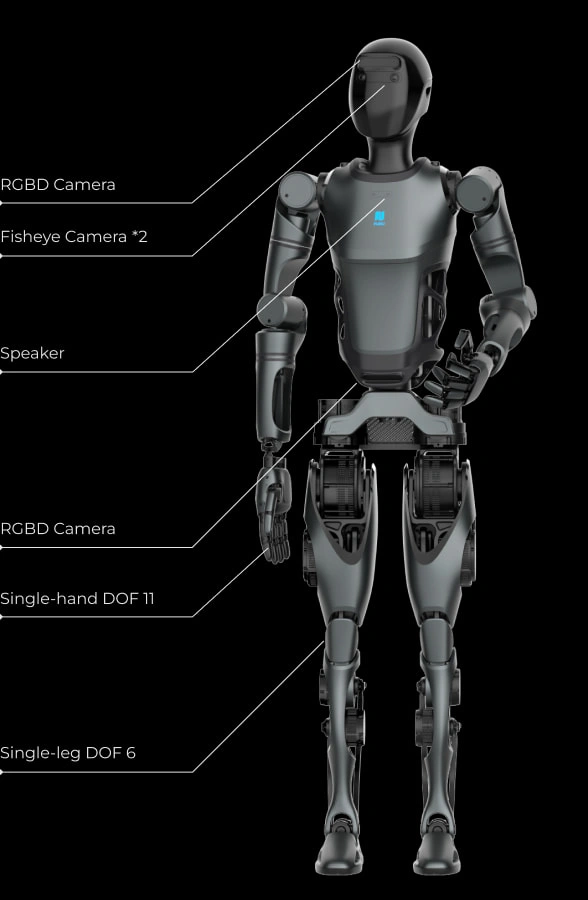
- 170 cm
- Height
- 65 kg
- Weight
- 42
- Independent Degree of Freedom
- 352 N·m
- Maximum Joint Torque
- 20 kg
- Maximum Payload(Test Environment)
- 2 m/s
- Maximum Walking Speed
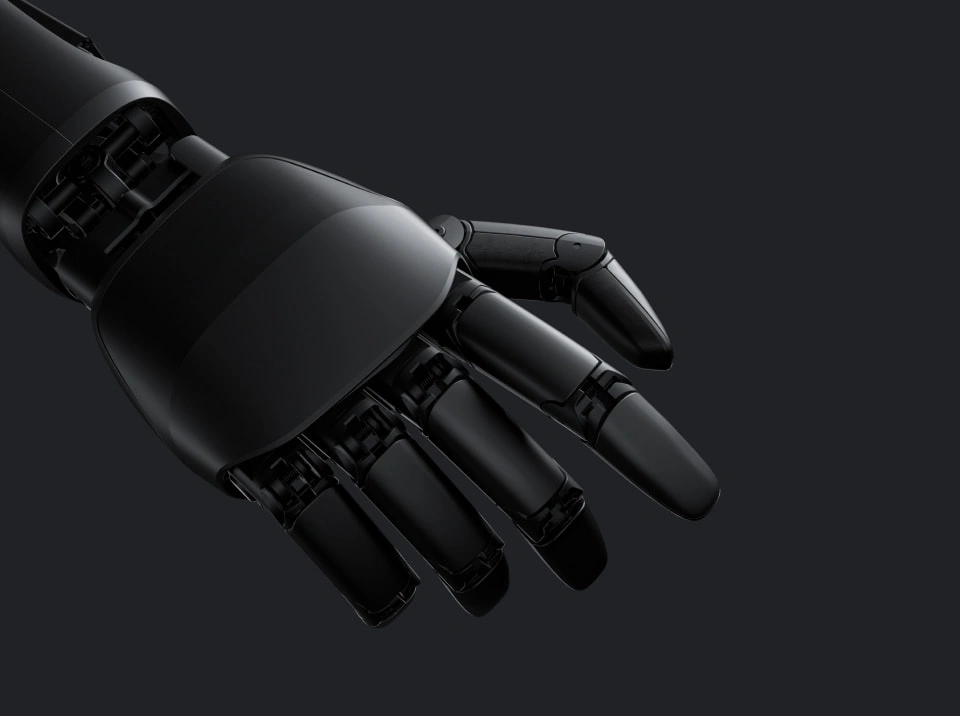

- 500 g
- Weight
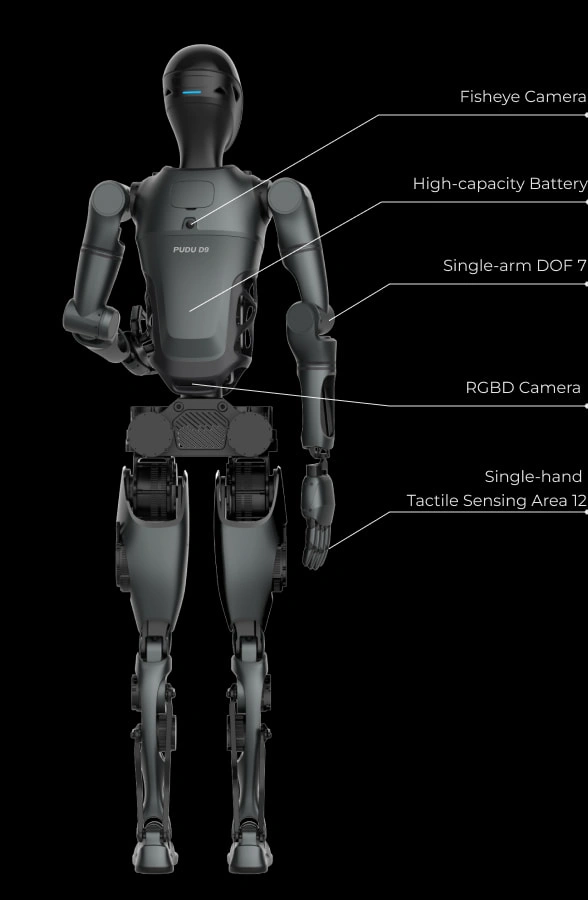
- 12
- Tactile Sensing Areas
- 1018
- Tactile Sensor Pixel
- 11 (6 Motor)
- Degrees of Freedom
- 30 N
- Maximum Palm Finger Grip
- 40 kg
- Maximum Lifting Load
- 150 °/s
- Palm Finger Bend Speed
- 191 °/s
- Thumb Bend Speed



Product Overview
- Height
- 170 cm (66.93 inches)
- Weight
- 65 kg (143.30 pounds)
- Leg Length
- Thigh 325 mm (12.80 inches)Calf 383 mm (15.08 inches)
- Arm Length
- Arm 580 mm (22.83 inches)Hand 220 mm (8.66 inches)
- Degrees of Freedom
- Total DOF 42Single-leg DOF 6Single-arm DOF 7
- Dexterous Hand(PUDU DH11)
- 12 Tactile Sensing RegionsActive DOF 6Passive DOF 5
- Maximum Joint Torque
- 352 N·m
- Maximum Payload
- 20 kg (44.09 pounds)Single-arm 10 kg (22.05 pounds)(Testing Environment)
- Sensors
- RGBRGBDTactile sensorsIMU
- Computing Power
- 275 TOPS
- Battery
- 15 Ah (0.72 kWh)
- Speaker
- Stereo
Note
1. In the product promotional materials, some example features are not yet available to customers; specific functionalities shall be based on the sales contract.
2. The product undergoes continuous iteration and optimization, and the shipped version may differ from the promotional content. Please confirm with the sales personnel before purchase.